Commande d’un onduleur réseau (ou isolé) monophasé de 3 kVA
La régulation est une technique de contrôle des grandeurs de sorties, utilisée dans de nombreuses applications, notamment dans le domaine de l’électronique de puissance. Dans le cas d’un onduleur réseau, on cherche à contrôler les grandeurs de sortie telles que le courant ou la tension selon le mode de fonctionnement (îsolé ou bien synchronisé au réseau).
Le contrôle des grandeurs de sorties de l’onduleur est essentiel pour assurer la stabilité et la fiabilité du système, ainsi que pour garantir un fonctionnement optimal. En effet, une régulation inadéquate peut entraîner des perturbations dans le réseau électrique, une perte d’efficacité ou même la détérioration du matériel.
En résumé, la régulation est une technique essentielle pour garantir un fonctionnement de l’onduleur fiable et efficace. Elle nécessite une expertise approfondie et des méthodes de contrôle adaptées aux différents modes de fonctionnement de l’onduleur.
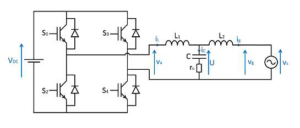
Figure 1 : Schéma de l’onduleur réseau
Pour que l’onduleur puisse fonctionner en mode autonome (réseau isolé) et en mode connecté au réseau (injection sur le réseau de distribution, Figure 1), différents types de régulateurs ont été éprouvés afin de déterminer celui qui répondra le mieux au cahier des charges du client.
Le cahier des charges de la régulation
Le cahier des charges demandé est relativement standard pour un fonctionnement sur le réseau de distribution :
• Dépassement de 10 %, soit un coefficient d’amortissement d’environ 0,6
• Temps de montée de 2 ms (1/10 de la période réseau)
• Erreur statique minimisée
• Puissance dans le filtre inférieur à 1 % de la puissance nominal
• THDI de 5 %
• Fréquence d’échantillonnage 50 kHz
La régulation est effectuée classiquement par retour d’état (feedback). La référence d’entrée (tension ou courant) du module est générée par une PLL (Phase Locked Loop), et l’acquisition du courant pour le retour d’état est effectuée à l’aide d’une sonde à effet hall LEM. La plateforme utilisée pour ce projet est le DSP TMS320F28335 de Texas instrument.
Méthodes de régulation classiques
Il existe plusieurs méthodes de régulations classiquement utilisés pour le pilotage d’un onduleur réseau ou isolé. La figure 2 présente les méthodes les plus couramment utilisées.
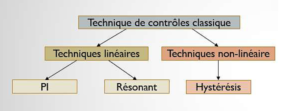
Figure 2 : Les différents types de contrôle
Le correcteur PI
Le correcteur de type PI est couramment utilisé en automatique pour asservir des grandeurs dont le régime permanent est statique. Il permet d’ajuster l’action de commande en fonction de la différence entre la consigne et la mesure de la grandeur à asservir. Le correcteur PI est composé d’un proportionnel et d’un intégrateur, qui agissent respectivement sur l’erreur instantanée et sur l’erreur cumulée au cours du temps. Avec une consigne sinusoïdale, il n’est pas capable d’annuler complètement l’erreur. Comme le montre la figure 3, le correcteur PI permet un asservissement du courant à 50Hz mais laisse une erreur statique (en amplitude et en phase).
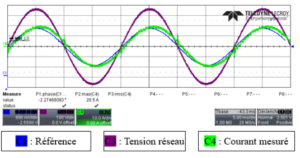
Figure 3 : Formes d’ondes (correcteur PI)
Le correcteur PR
Dans certains cas, un correcteur plus complexe est nécessaire pour atteindre une précision accrue dans le suivi de la consigne. C’est le cas lorsque l’on souhaite suivre une consigne sinusoïdale. On utilise un correcteur PR ou Résonnant qui est composé d’un terme proportionnel et d’un terme résonnant. Ce type de correcteur, plus coûteux en temps d’instruction pour le microcontrôleur, permet d’asservir une consigne sinusoïdale sans composante continue. Comme le montre la figure 4, le correcteur PR annule l’erreur statique.
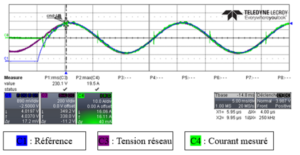
Figure 4 : Formes d’ondes (Correcteur PR)
Le correcteur PI tournant
Une alternative consiste à recourir à un correcteur PI dans un repère tournant. La composante sinusoïdale y est transformée en consigne continue et le PI peut alors annuler l’erreur. Il implique un coût encore plus élevé en temps de calcul, en raison de la nécessité d’exécuter plusieurs étapes de calcul (transformée de Park et de Clarke), et semble plus adapté à un fonctionnement triphasé.
La commande par hystérésis
Enfin, la commande par hystérésis consiste à maintenir le courant à l’intérieur d’une bande encadrant sa référence. L’écart existant entre le courant mesuré et le courant de référence est comparé à une bande fixe. Chaque sortie de la bande entraîne un changement de la configuration des interrupteurs. Cette technique a pour avantage d’être rapide et très simple. Pour un contrôle en courant, la fréquence de commutation dépend principalement de la dérivée du courant de consigne. L’amplitude de cette dérivée n’est pas contrôlée et donc la fréquence de commutation n’est pas fixe.
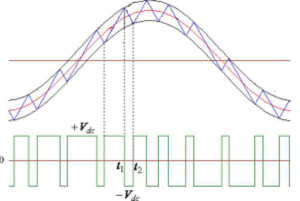
Figure 5 : Formes d’ondes (hystérésis)
Conclusion
En conclusion, la régulation joue un rôle crucial dans le contrôle des grandeurs de sortie de l’onduleur réseau afin d’assurer la stabilité et la fiabilité du système. Le choix de la méthode de régulation dépend du cahier des charges du client ainsi que des exigences de précision et de temps de réponse.
Dans le cas de l’onduleur synchronisé au réseau, le correcteur Proportionnel-Résonant permet d’atteindre d’excellentes performantes pour un coût en temps de calcul très raisonnable. Il est relativement facile à mettre en œuvre et à régler. Le correcteur Proportionnel-Intégral est plus rapide à exécuter et peut répondre à une application plus contraintes par la durée d’exécution, mais atteint des performances moins bonnes (erreur résiduelle) et reste plus difficile à régler. Enfin, le correcteur à Hystérésis n’est pas facilement adaptable d’un convertisseur à l’autre et implique un dimensionnement des composants passifs plus difficile. Le correcteur PI tournant est plus complexe à mettre en œuvre et demande des temps de calcul importants pour un gain en performance très relatif. Ce correcteur présente plus d’avantages dans un système triphasé.
